In situ ROV characterization of seismogenIc faults in the Alboran Sea: Preliminary results from the EUROFLEETS2 IRIS cruise
|
Project Acronym &Title: IRIS, In situ ROV characterization of seismogenIc faults in the Alboran Sea
|
    |
|
Eulàlia Gràcia, CSIC, Spain |
 |
Main Objectives
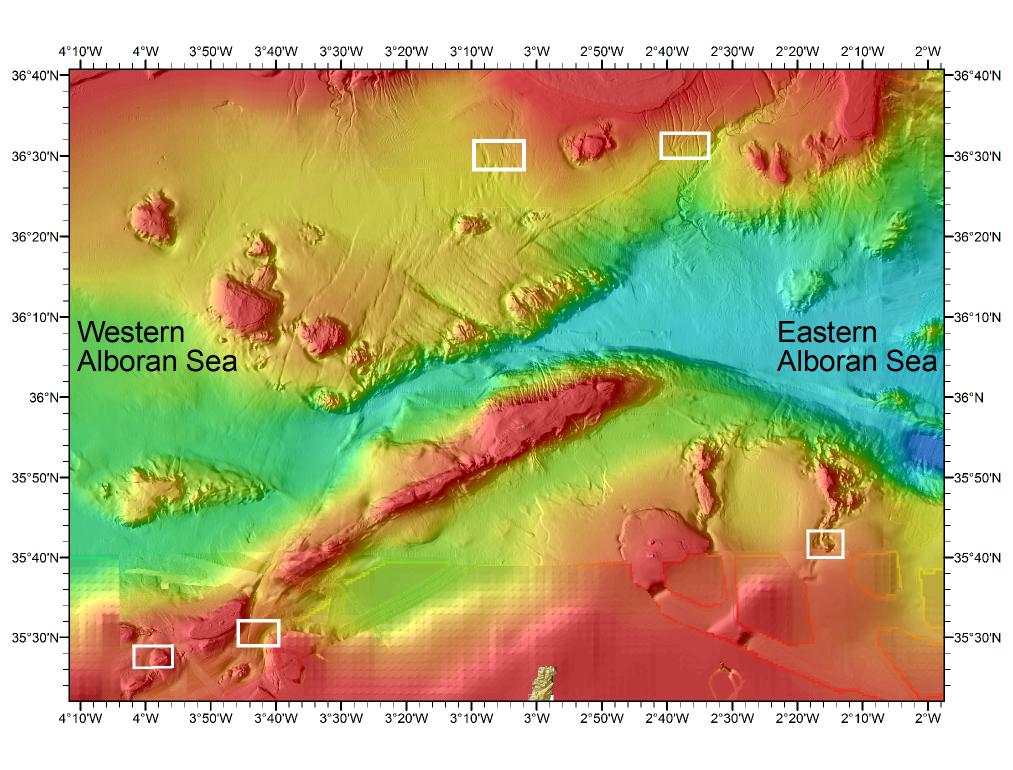
The IRIS project (“In situ ROV characterization of seismogenIc faults in the Alboran Sea”, ref. EF2-EE-003) funded by EUROFLEETS2 “Embarked Equipment 2013”, allowed us to perform 10 ROV dives, acquire high-resolution seismic records and collect gravity cores onboard the RV “Sarmiento de Gamboa” in the frame of the SHAKE project (Searching the record of past earthquakes in south Iberia: Advances technologies in marine paleoseismology), granted by the Spanish Ministry of Science and Innovation and aimed to carry out a marine paleoseismological study of active faults in the Alboran Sea. In the frame of the SHAKE Cruise, a total of 30-day shiptime onboard the Spanish RV “Sarmiento de Gamboa” have been allocated to carry out the first in situ micro-bathymetric mapping of active faults and deep-sea habitats in the Alboran Sea, through the use of 2 AUVs from IFREMER (France) during the first part of the cruise (Leg 1: 23 April to 14 May 2015).
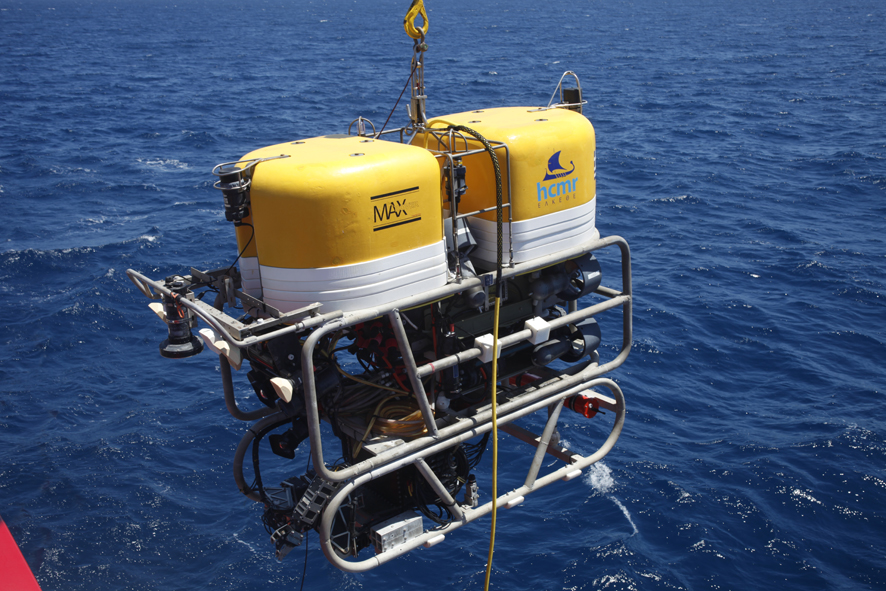
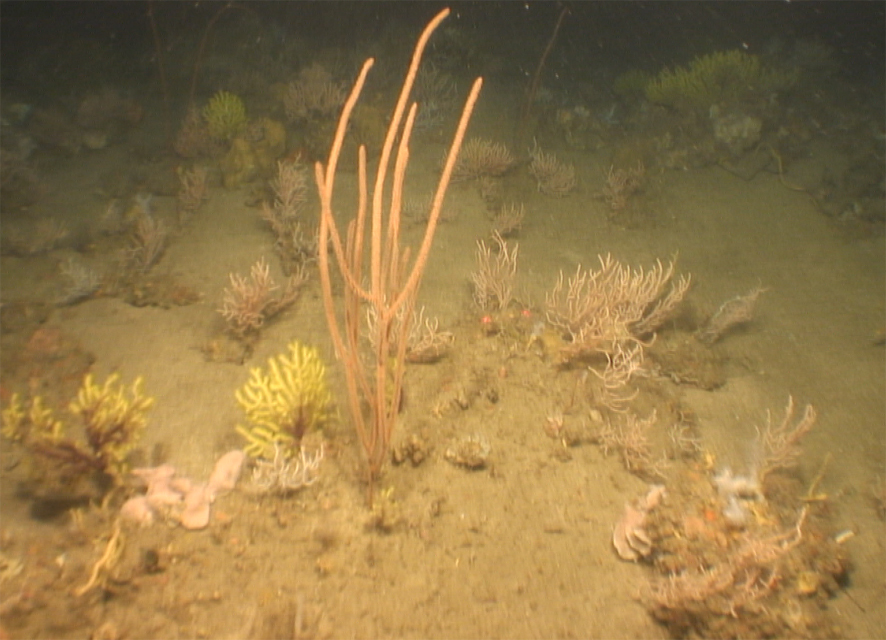
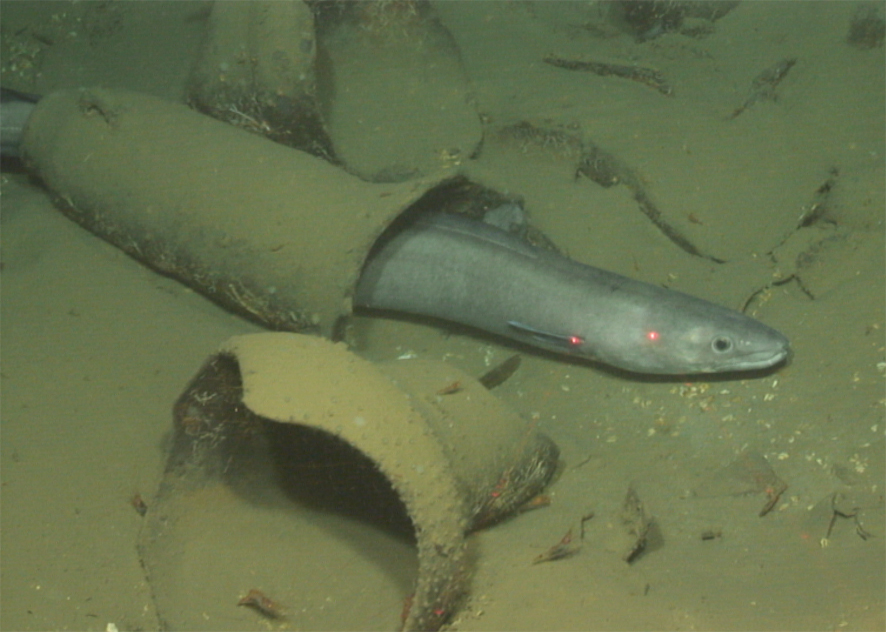
The second part of the cruise (Leg 2: 15 May to 23 May 2015), corresponding to the IRIS Project, has been devoted to the direct visual seafloor exploration and sampling of selected sites, using the Remote Operated Vehicle (ROV) “Max Rover” from the Hellenic Centre of Marine Research (HCMR), offered in the EUROFLEETS2 “Embarked Equipment” Call. We unveiled interesting morphologic features such as fault scarps, seafloor depressions related to gas escapes named pockmarks and nice coral reefs up to 300 m deep.
Work progress and main achievements
|
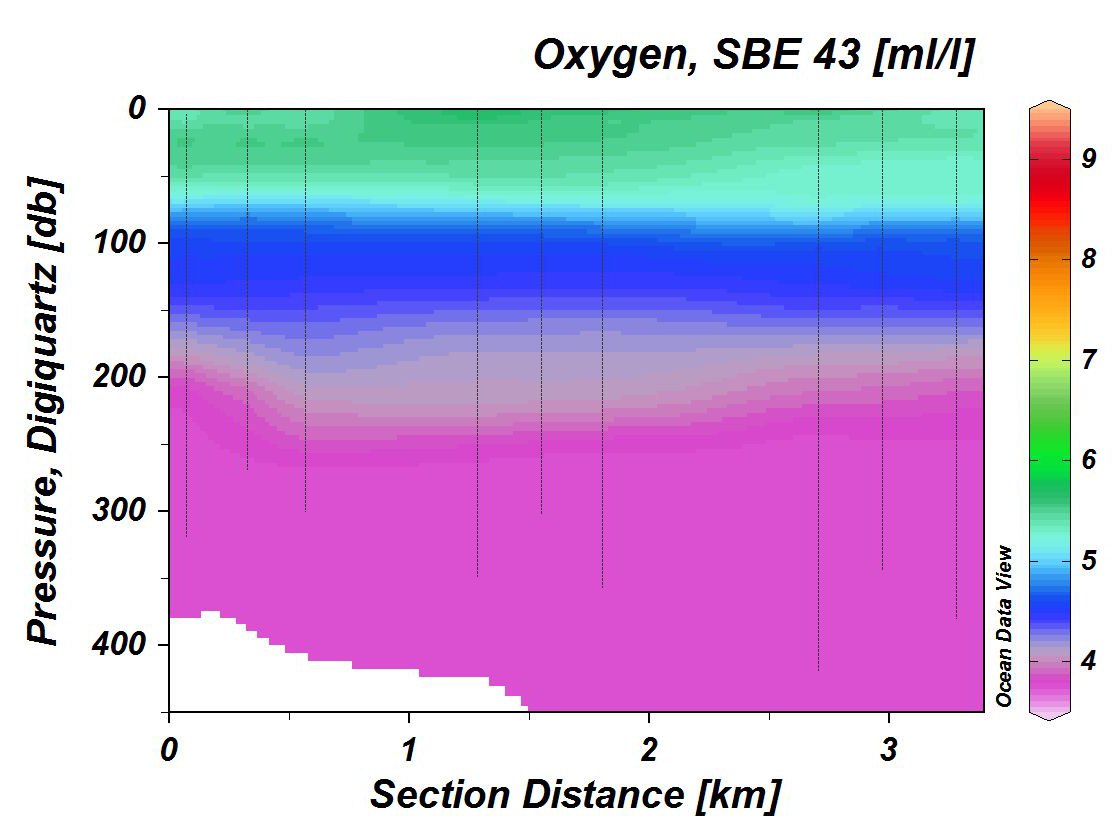
The ROV “Max Rover” is a Remotely Operated Vehicle operated by the Hellenic Centre for Marine Research (HCMR), acquired in 1998 and updated in 2002. The Max Rover has a maximum operating depth of 2000 m. It has 6 electric motors x 2.0 hp, for a resulting underwater speed of approximately 2.5 knots (fwd/rev) and 1.5 knots (vert/lat) with 160 kg bollard pull. Average transect speed on the seabed would be approximately 800 m in one hour. The ROV has several cameras, with main camera an HDTV full frame Colour Camera with zoom lens. Two parallel red lasers with 10 cm separation are used as a spatial reference. Lights are 2 x 100 W HID and 4 x 150 W Quartz. The 2 electro-hydraulic manipulators have 5 functions. The Max Rover is able to collect geological and biological samples from the seafloor and push-cores from the subseafloor. The Max Rover can also collect water samples through a 5 l Niskin bottle and acquires CTD data during the entire dive. Video graphics overlay on surface video include date, time, depth and position. Video footage during IRIS was acquired along dive tracks previously selected from the SHAKE dataset (ultra high resolution AUV bathymetry) with the function of potentially quantify specific morphometric parameters from fault scarps, assess the activity of mapped pockmarks and measure the composition, richness and diversity of the explored reefs. A total of ten dives were performed during IRIS, for a cumulative time of 2074 minutes. Six dives were mainly aimed to detect potential tectonic features (i.e. recent fault scarps, pockmarks), visualize them and collect geological and biological samples. “Geological” dives were carried out on the North-South Faults, on the Carboneras Fault, on the Al Idrissi Fault. Four dives were performed along specific geological features with the aim to visit possible reef forming habitats on top of them (Tofinho and Cabliers Banks). As complementary data, CTD-ADCP (Conductivity Temperature Depth – Acoustic Doppler Current Profiler) casts and seismic Sparker records were acquired along specific areas. The CTD deployed during the IRIS cruise was the Seabird SBE9. The SBE9 can measure conductivity, temperature, dissolved oxygen, fluorescence, turbidity and pressure (i.e. water depth) along the water column. The CTD-rosette was equipped with two Lowered ADCP (L-ADCP) operating at a frequency of 300 KHz: one up-looking (slave) and one down-looking (master). Compared to the standard shipboard ADCP the L-ADCP has the main advantage to acquire in-situ intensities and direction of current. |
   |
For more information:
